|
|

|

|
| e-Pub |
Section: New Results
Haptic Cueing for Robotic Applications
Haptic Guidance of a Biopsy Needle
Participants : Hadrien Gurnel, Alexandre Krupa.
The objective of this work is to provide assistance during manual needle steering for biopsies or therapy purposes (see Section 9.1.6). At the difference of our work presented in Section 7.2.9 where a robotic system is used to autonomously actuate the needle, we propose in this study another way of assistance for needle insertion. The principle is to provide haptic cue feedback to the clinician in order to help him during his manual gesture by the application of repulsive or attractive forces. The proposed solution is based on a shared robotic control, where the clinician and a haptic device, both holding the base of the needle, cooperate together. In a preliminary study, we elaborated 5 different haptic-guidance strategies to assist the needle pre-positioning and pre-orienting on a pre-defined insertion point, and with a pre-planned desired incidence angle. From this pre-operative information and intra-operative measurements of the location of the needle, haptic cues are generated to guide the clinician toward the desired needle position and orientation. These 5 different haptic guides were recently tested by 2 physicians, both experts in needle manipulation and compared to the reference gesture performed without assistance. The results have been submitted to the IPCAI 2019 conference. Future work will consist in evaluating the different haptic guides from an user-experience study involving more participants.
Wearable Haptics
Participants : Marco Aggravi, Claudio Pacchierotti, Paolo Robuffo Giordano.
We worked on a wearable haptic device for the forearm and its application in robotic teleoperation [8]. The device is able to provide skin stretch, pressure, and vibrotactile stimul, see Fig. 10. Two servo motors, housed in a 3D printed lightweight platform, actuate an elastic fabric belt, wrapped around the arm. When the two servo motors rotate in opposite directions, the belt is tightened (or loosened), thereby compressing (or decompressing) the arm. On the other hand, when the two motors rotate in the same direction, the belt applies a shear force to the arm skin. Moreover, the belt houses four vibrotactile motors, positioned evenly around the arm at 90 degrees from each other. The device weights 220 g for 11512250 mm of dimensions, making it wearable and unobtrusive. We carried out a perceptual characterization of the device as well as two human-subjects teleoperation experiments in a virtual environment, employing a total of 34 subjects.
|
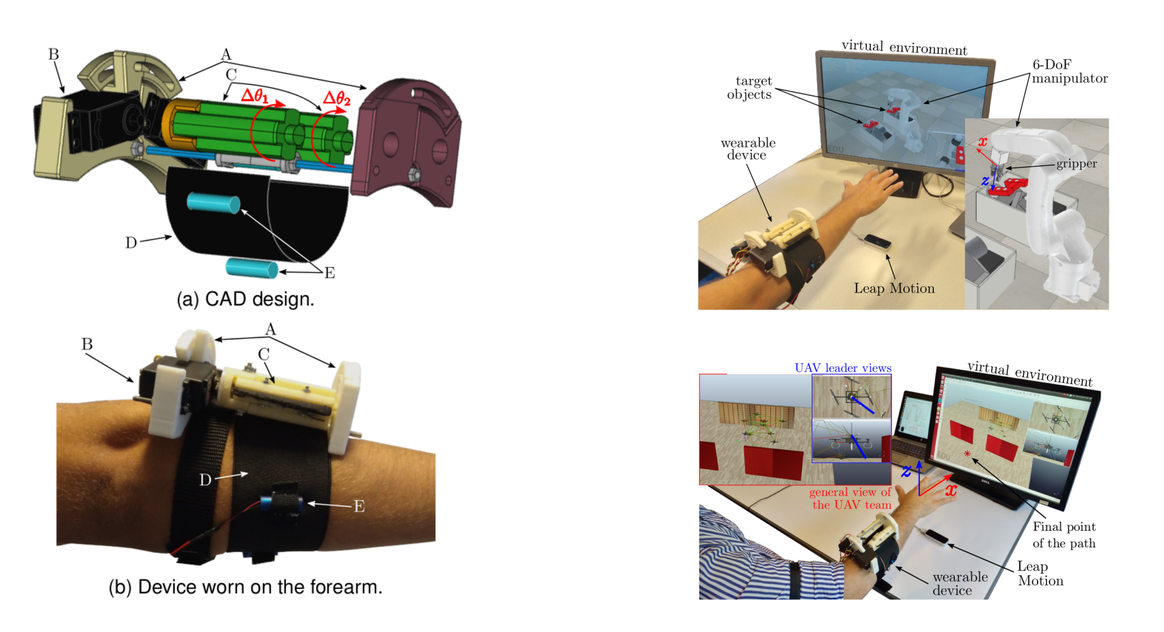
In the first experiment, participants were asked to control the motion of a robotic manipulator for grasping an object; in the second experiment, participants were asked to teleoperate the motion of a quadrotor fleet along a given path. In both scenarios, the wearable haptic device provided feedback information about the status of the slave robot(s) and of the given task. Results showed the effectiveness of the proposed device. Performance on completion time, length trajectory, and perceived effectiveness when using the wearable device improved of 19.8%, 25.1%, and 149.1% than when wearing no device, respectively. Finally, all subjects but three preferred the conditions including wearable haptics.
Mid-Air Haptic Feedback
Participants : Claudio Pacchierotti, Thomas Howard.
GUIs have been the gold standard for more than 25 years. However, they only support interaction with digital information indirectly (typically using a mouse or pen) and input and output are always separated. Furthermore, GUIs do not leverage our innate human abilities to manipulate and reason with 3D objects. Recently, 3D interfaces and VR headsets use physical objects as surrogates for tangible information, offering limited malleability and haptic feedback (e.g., rumble effects). In the framework of project H-Reality, we are working to develop novel mid-air haptics paradigm that can convey the information spectrum of touch sensations in the real world, motivating the need to develop new, natural interaction techniques. Moreover, we want to use robotic manipulators to enlarge the workspace of mid-air haptic systems, using depth cameras and visual servoing techniques to follow the motion of the user's hand.
Haptic Cueing in Telemanipulation
Participants : Firas Abi Farraj, Paolo Robuffo Giordano, Claudio Pacchierotti.
Robotic telemanipulators are already widely used in nuclear decommissioning sites for handling radioactive waste. However, currently employed systems are still extremely primitive, making the handling of these materials prohibitively slow and ineffective. As the estimated cost for the decommissioning and clean-up of nuclear sites keeps rising, it is clear that one would need faster and more effective approaches. Towards this goal, we presented the user evaluation of a recently proposed haptic-enabled shared-control architecture for telemanipulation [51]. An autonomous algorithm regulates a subset of the slave manipulator degrees of freedom (DoF) in order to help the human operator in grasping an object of interest. The human operator can then steer the manipulator along the remaining null-space directions with respect to the main task by acting on a grounded haptic interface. The haptic cues provided to the operator are designed in order to inform about the feasibility of the user's commands with respect to possible constraints of the robotic system. This work compared this shared-control architecture against a classical 6-DOF teleoperation approach in a real scenario by running experiments with 10 subjects. The results clearly show that the proposed shared-control approach is a viable and effective solution for improving currently-available teleoperation systems in remote telemanipulation tasks.
Haptic Feedback for an Augmented Wheelchair Driving Experience
Participants : Louise Devigne, Marie Babel, François Pasteau.
Smart powered wheelchairs can increase mobility and independence for people with disability by providing navigation support. For rehabilitation or learning purposes, it would be of great benefit for wheelchair users to have a better understanding of the surrounding environment while driving. Therefore, a way of providing navigation support is to communicate information through a dedicated and adapted feedback interface. We have then proposed a framework in which feedback is provided by sending forces through the wheelchair controller as the user steers the wheelchair. This solution is based on a low complex optimization framework able to perform smooth trajectory correction and to provide obstacle avoidance. The impact of the proposed haptic guidance solution on user driving performance was assessed during this pilot study for validation purposes through an experiment with 4 able-bodied participants. Results of this pilot study showed that the number of collisions significantly decreased while force feedback was activated, thus validating the proposed framework [60].
Virtual Shadows to Improve Self Perception in CAVE
Participants : Guillaume Cortes [Hybrid] , Eric Marchand.
In immersive projection systems (IPS), the presence of the user's real body limits the possibility to elicit a virtual body ownership illusion. But, is it still possible to embody someone else in an IPS even though the users are aware of their real body ? In order to study this question, we propose to consider using a virtual shadow in the IPS, which can be similar or different from the real user's morphology. We have conducted an experiment () to study the users' sense of embodiment whenever a virtual shadow was or was not present. Participants had to perform a 3D positioning task in which accuracy was the main requirement. The results showed that users widely accepted their virtual shadow (agency and ownership) and felt more comfortable when interacting with it (compare to no virtual shadow). Yet, due to the awareness of their real body, the users have less acceptance of the virtual shadow whenever the shadow gender differs from their own. Furthermore, the results showed that virtual shadows increase the users' spatial perception of the virtual environment by decreasing the inter-penetrations between the user and the virtual objects. Taken together, our results promote the use of dynamic and realistic virtual shadows in IPS and pave the way for further studies on “virtual shadow ownership” illusion.